
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artikkeli, joka ymmärtää eron askelmoottoreiden ja servo- ja servomoottorien välillä
I. Erot askelmoottoreiden ja servo- ja servomoottorien välillä
Askelmoottori: on sähköinen pulssisignaali avoimen silmukan ohjauselementin askelmoottorin osien kulma- tai linjasiirtymään. Yksinkertaisesti sanottuna se luottaa sähköiseen pulssisignaaliin kulman ja kierrosten määrän ohjaamiseen. Joten hän luottaa vain pulssisignaaliin määrittääkseen, kuinka paljon kiertoa. Koska anturia ei ole, pysäytyskulma voi poiketa. Tarkka pulssisignaali kuitenkin minimoi poikkeaman.
Servomoottori: luota servo-ohjauspiiriin ohjataksesi moottorin nopeutta, anturin kautta ohjataksesi pyörimisasentoa. Asennonsäätö on siis erittäin tarkka. Ja pyörimisnopeus on myös vaihteleva.
Servo (Electronic Servo): Servon pääkomponentti on servomoottori. Se sisältää servomoottorin ohjauspiirin + alennusvaihdesarjan. Ai niin, servomoottorissa ei ole alennusvaihdesarjaa. Ja servossa on alennusvaihdesarja.
Rajaservon tapauksessa se luottaa ulostuloakselin alla olevaan potentiometriin peräsinvarren ohjauskulman määrittämiseksi. Servosignaalin ohjaus on pulssinleveysmoduloitu (PWM) signaali, jossa mikro-ohjain voi helposti luoda tämän signaalin.
II. Askelmoottorin perusperiaate
Miten se toimii:
Normaalisti moottorin roottori on kestomagneetti, ja kun virta kulkee staattorin käämien läpi, staattorikäämit tuottavat vektorimagneettikentän. Tämä magneettikenttä saa roottorin pyörimään kulman verran siten, että roottorin magneettikenttäparin suunta on sama kuin staattorin magneettikentän suunta. Kun staattorin vektorimagneettikenttä pyörii kulman verran. Roottori pyörii myös kulman verran tämän magneettikentän kanssa. Jokaista sähköpulssia kohden moottori pyörii yhden kulmaaskeleen eteenpäin. Sen ulostulokulmasiirtymä on verrannollinen sisääntulopulssien lukumäärään ja sen pyörimisnopeus on verrannollinen pulssien taajuuteen. Muuttamalla järjestystä, jossa käämit saavat jännitteen, moottori kääntyy. Siksi pulssien lukumäärää ja taajuutta sekä moottorin kunkin vaiheen käämien syöttöjärjestystä voidaan ohjata askelmoottorin pyörimisen ohjaamiseksi.
Lämmöntuoton periaate:
Yleensä nähdään kaikenlaisia moottoreita, sisäiset ovat rautasydän ja käämikela. Käämin vastus, teho tuottaa häviötä, häviön kokoa ja vastusta ja virta on verrannollinen neliöön, jota usein kutsutaan kuparihäviöksi, jos virta ei ole standardi DC- tai siniaalto, tuottaa myös harmonisen häviön; ytimellä on hystereesipyörrevirtavaikutus, vaihtuvassa magneettikentässä tuottaa myös häviötä, materiaalin kokoa, virtaa, taajuutta, jännitettä, jota kutsutaan rautahäviöksi. Kuparihävikki ja rautahävikki ilmenevät lämmönmuodostuksena, mikä vaikuttaa moottorin hyötysuhteeseen. Askelmoottori pyrkii yleensä paikannustarkkuuteen ja vääntömomenttituloon, hyötysuhde on suhteellisen alhainen, virta on yleensä suurempi ja harmoniset komponentit korkeat, virran taajuus vaihtelee nopeuden ja muutoksen kanssa, joten askelmoottoreilla on yleensä lämpötilanne ja tilanne on vakavampi kuin yleinen AC-moottori.
III. Peräsimen rakenne
Servo koostuu pääosin kotelosta, piirilevystä, käyttömoottorista, vaihteistosta ja asennontunnistuselementistä. Sen toimintaperiaate on, että vastaanotin lähettää signaalin servolle ja piirilevyllä oleva IC käynnistää ytimetttömän moottorin pyörimään ja teho välittyy alennusvaihteen kautta kääntövarteen ja samalla asentotunnistin lähettää signaalin takaisin määrittääkseen onko se saapunut paikannukseen vai ei. Paikkatunnistin on itse asiassa muuttuva vastus. Kun servo pyörii, vastuksen arvo muuttuu vastaavasti ja kiertokulma voidaan tietää tunnistamalla vastuksen arvo. Yleinen servomoottori on ohut kuparilanka, joka on kiedottu kolminapaisen roottorin ympärille, jolloin kelan läpi kulkeva virta muodostaa magneettikentän, ja roottorimagneetin kehä tuottaa hylkimisen, mikä puolestaan kehittää pyörimisvoiman. Fysiikan mukaan esineen hitausmomentti on suoraan verrannollinen sen massaan, joten mitä suurempi on pyöritettävän kohteen massa, sitä suurempi voima tarvitaan. Nopean pyörimisnopeuden ja alhaisen virrankulutuksen saavuttamiseksi servo on valmistettu ohuista kuparilangoista, jotka on kierretty erittäin ohueksi ontoksi sylinteriksi, muodostaen erittäin kevyen onton roottorin ilman napoja, ja magneetit on sijoitettu sylinterin, joka on onttokuppimoottori, sisään.
Eri työympäristöihin soveltuvia servoja on vedenpitävä ja pölytiivis; ja vastauksena erilaisiin kuormitusvaatimuksiin servoille on saatavana muovi- ja metallivaihteita, ja servojen metalliset hammaspyörät ovat yleensä suurimomenttisia ja -nopeita, ja sen etuna on, että vaihteet eivät halkeile liiallisen kuormituksen takia. Korkeamman luokan servot varustetaan kuulalaakereilla, jotta pyöriminen olisi nopeampaa ja tarkempaa. Yhden kuulalaakerin ja kahden kuulalaakerin välillä on eroa, tietysti molemmat kuulalaakerit ovat parempia. Uudet FET-servot käyttävät pääasiassa FET:iä (Field Effect Transistor), jonka etuna on alhainen sisäinen vastus ja siten pienempi virtahäviö kuin tavallisissa transistoreissa.
IV. Servon toimintaperiaate
Vuodesta pwm-aalto sisäiseen piiriin tuottamaan esijännite, kontaktorigeneraattori alennusvaihteen kautta ajaa potentiometrin liikkumaan niin, että kun jännite-ero on nolla, moottori pysähtyy, jotta saavutetaan servovaikutus.
Servo-PWM-protokollat ovat kaikki samat, mutta uusimmat servot voivat olla erilaisia.
Protokolla on yleensä: korkean tason leveys 0,5 ms ~ 2,5 ms servon ohjaamiseksi kääntymään eri kulmien läpi.
V. Kuinka servomoottorit toimivat
Alla olevassa kuvassa on servomoottorin ohjauspiiri, joka on tehty tehooperaatiovahvistimella LM675, ja moottori on DC-servomoottori. Kuten kuvasta näkyy, tehooperaatiovahvistimeen LM675 syötetään 15V ja 15V jännite lisätään operaatiovahvistimen LM675 samanvaiheiseen tuloon RP 1:n kautta ja LM675:n lähtöjännite lisätään servomoottorin tuloon. Moottori on varustettu nopeudenmittaussignaaligeneraattorilla moottorin nopeuden reaaliaikaista havaitsemista varten. Itse asiassa nopeussignaaligeneraattori on eräänlainen generaattori, ja sen lähtöjännite on verrannollinen pyörimisnopeuteen. Nopeusmittaussignaaligeneraattorin G jännitelähtö syötetään takaisin operaatiovahvistimen invertoivaan sisäänmenoon nopeusvirhesignaalina jännitteenjakopiirin jälkeen. Nopeuskäskypotentiometrillä RP1 asetettu jännitearvo lisätään operaatiovahvistimen samanvaiheiseen tuloon jännitteen jakamisen jälkeen R1.R2:lla, mikä vastaa referenssijännitettä.
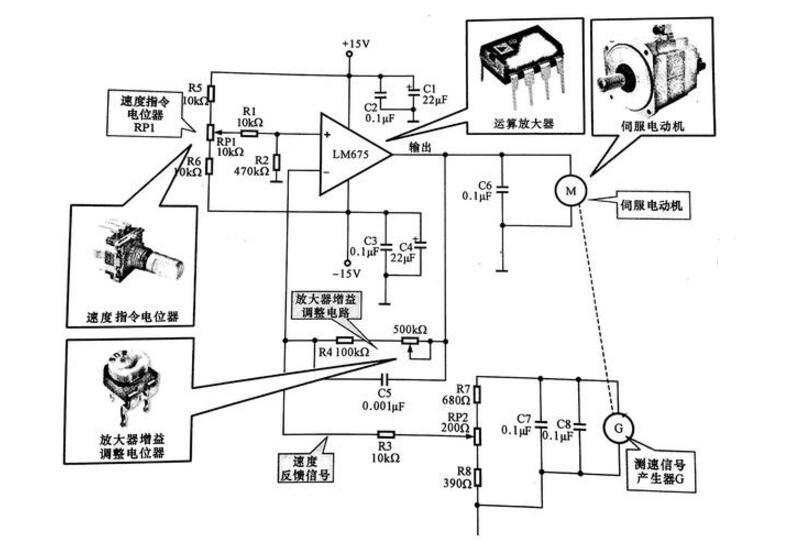
Servomoottorin ohjauskaavio
Servomoottori: Merkitään kirjaimella M servomoottorille, se on voimanlähde käyttöjärjestelmälle. Operaatiovahvistin: merkitty piirin nimellä, eli LM675, on servoohjauspiirin vahvistinosa, joka tuottaa käyttövirran servomoottorille.
Nopeuskäskypotentiometri RP1: Asettaa piirin operaatiovahvistimen referenssijännitteen eli nopeusasetuksen. Vahvistimen vahvistuksen säätöpotentiometri RP2: Käytetään piirissä vahvistimen vahvistuksen ja nopeuden takaisinkytkentäsignaalin koon hienosäätämiseen.
Kun moottorin kuormitus muuttuu, myös operaatiovahvistimen käänteiseen sisäänmenoon syötetty jännite muuttuu, eli kun moottorin kuormitusta nostetaan, nopeus laskee ja myös nopeussignaaligeneraattorin lähtöjännite pienenee, jolloin operaatiovahvistimen käänteisen sisääntulon jännite pienenee, vertailujännitteen lähtöjännitteen ja käyttöjännitteen välinen ero pienenee. vahvistin kasvaa. Päinvastoin, kun kuorma pienenee ja moottorin nopeus kasvaa, nopeudenmittaussignaaligeneraattorin lähtöjännite nousee, operaatiovahvistimen käänteiseen tuloon lisätty takaisinkytkentäjännite kasvaa, tämän jännitteen ja referenssijännitteen välinen ero pienenee, operaatiovahvistimen lähtöjännite laskee ja moottorin nopeus laskee automaattisesti asetettuun pyörimisnopeuteen, joten moottorin nopeus laskee automaattisesti asetetulla nopeudella.


