
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Koti
>
Tuotteet > RS485- tai CAN- tai Ethercat-väylätyyppinen Stepper Driver > CAN Avaa Stepper Driver > 2-vaiheinen Ethercat Nema34 12nm avoimen silmukan askelohjain OL3-E86H
Tuotteet
- AC servomoottori
- DC servomoottori
- Suljetun silmukan askelmoottori
- Hybird askelmoottori
- Hybird Stepper -moottorin ohjain
- Suljetun silmukan askelmoottorin ohjain
- AC servomoottorin ohjain
- Integroitu askelmoottori
- DC servomoottorin ohjain
- Ruuvi moottori
- RS485- tai CAN- tai Ethercat-väylätyyppinen Stepper Driver
- Planeettavähentäjä
- PLC-ohjain
- HMI kosketusnäyttö
- Ethercat AC servomoottorin ajurisarja
- A8 AC servomoottorin ohjainsarja
- Integroitu servomoottori
Uudet tuotteet
 Lichuan AC servomoottorin ohjainsarja SUURI TEHO 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuan AC servomoottorin ohjainsarja SUURI TEHO 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuan AC servomoottorin ohjainsarja SUURI TEHO 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuan AC servomoottorin ohjainsarja SUURI TEHO 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuan AC servomoottoriohjainsarja SUURI TEHO 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuan AC servomoottoriohjainsarja SUURI TEHO 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuan AC servomoottorin ohjainsarja SUURI TEHO 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
Lichuan AC servomoottorin ohjainsarja SUURI TEHO 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- Kaikki uudet tuotteet

2-vaiheinen Ethercat Nema34 12nm avoimen silmukan askelohjain OL3-E86H
Olet tervetullut tulemaan LICHUAN®-tehtaalle ostamaan viimeisimmät myydyt, edulliset ja korkealaatuiset 2-vaiheiset Ethercat Nema34 12nm avoimen silmukan Stepper Driver OL3-E86H. Odotamme innolla yhteistyötä kanssasi.
Lähetä kysely
Tuotteen Kuvaus
LICHUAN® toivottaa sinut lämpimästi tervetulleeksi tukkumyyntiin 2-vaiheisen Ethercat Nema34 12nm avoimen silmukan Stepper Driver OL3-E86H -tehtaallamme Kiinasta. Tuotteemme ovat CE-sertifioituja ja niillä on tällä hetkellä suuri määrä tehdasvarastoa. Lichuanin tehtaalla on yli 14 vuoden tuotantokokemus. Tuemme OEM- ja ODM-tukea, tarjoamme sinulle hyvää palvelua ja tehdasalennuksia. Toivotamme lisää jakelijoita tervetulleeksi liittymään LICHUANiin.
EtherCAT-väylätyyppinen suljetun silmukan askelohjain on digitaalinen suljetun silmukan askelohjain, joka yhdistää uusimmat
suljetun silmukan ohjausalgoritmi ja EtherCAT-väylän tiedonsiirtoprotokolla. Tämä tuote tukee CoE (CANopen over EtherCAT) -protokollaa ja on CIA402-standardin mukainen. Perinteiseen pulssityyppiseen ohjaimeen verrattuna
väylä-tyyppinen kuljettaja on yksinkertaisempi johdotus, reaaliaikainen tiedonsiirto, korkea luotettavuus viestintä, ja voi toteuttaa
moniakselinen synkroninen viestintäohjaus. Tämä sarja ohjaimia näyttelee kehittyneitä suljetun silmukan algoritmeja,
joka voi tehokkaasti tukahduttaa moottorin lämpötilan nousun, vähentää moottorin tärinää ja lisätä tehokkaasti moottoria
vääntömomentti. Se voidaan sovittaa 86-sarjan suljetun silmukan askelmoottoreihin.
Viestinnän tekniset tiedot
| EtherCAT Viestintä tekniset tiedot |
Fyysinen kerros | 100BASE-TX |
| Tiedonsiirtoliitin | RJ45×2(tulo: CN6A; lähtö: CN6B) | |
| Verkko arkkitehtuuri |
Sarjayhteys | |
| Tiedonsiirtonopeus | 2 x1 Mbps (täyskaksisuuntainen) | |
| Tietokehyksen pituus | Max. 1484 tavua | |
| Sovelluskerroksen protokolla | CoE: CANopen over EtherCAT | |
| Synkroninen tila | DC synkroninen tila (SYNCO) Asynkroninen tila (vapaakäyttö) |
|
| Viestintäobjekti | SDO: jaksollinen dataobjekti PDO: jaksollinen tietoobjekti EMCY: hätätilanne |
|
| Sovelluskerroksen erittely | CiA402-asemaprofiili | |
| Tuetut ohjaustilat | Profiilin sijaintitila (PP) Profiilin nopeustila (PV) Kotiutustila (HM) Kierrä synkronoitu sijaintitila (CSP) |
2-vaiheinen Ethercat Nema34 12nm avoimen silmukan Stepper Driver OL3-E86H tekniset tiedot
| Ajo-malli Parametri | OL3-E57H | CL3-E57H | OL3-E86H | CL3-E86H |
| Sopiva moottori | 42/57/60 | 42/57/60 | 86 | 86 |
| Syöttöjännite | 24~48V DC | 24~48V DC | 24~80V AC | 24~80V AC |
| Lähtövirta | 5A | 5A | 8A | 8A |
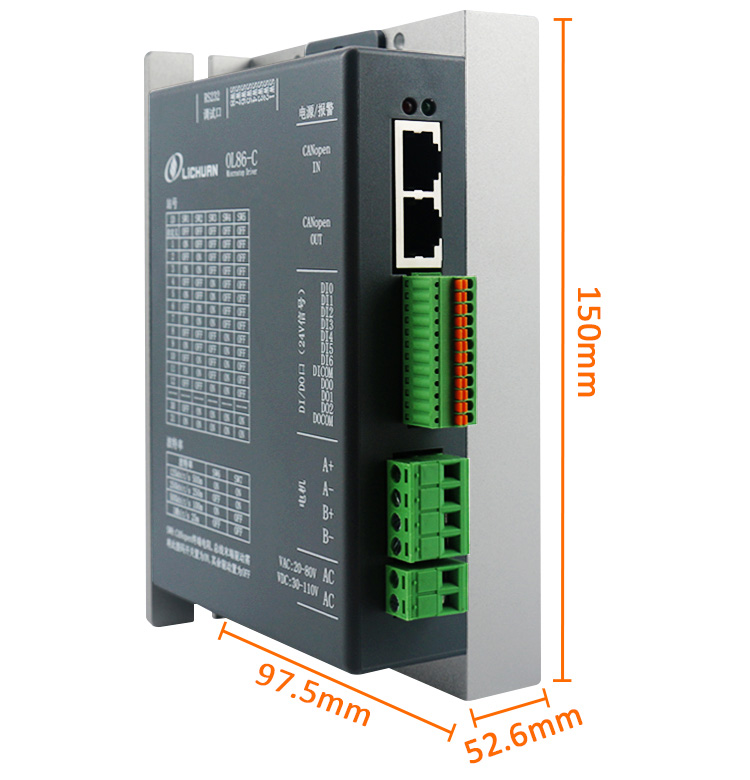
| aseman koko | 133*34*90 | 133*34*90 | 151*40*114 | 151*40*114 |
| ajaa painoa |
|
|
|
|

Lichuanin tehtaan tuotantokone
-

Kaiverruskone -

Päällystyslaitteet -

Fiber laster -merkintäkone -

Ruuvikone -

Testauskone -

UV-tulostin
-

Automaattinen juotoskone -

Pitämällä vääntömomentin testauskonetta -

Ruuvikone -

Oskillografi kone
Teollisuuden sovellukset
-

Robottivarsi -

Laserleikkauskone
-

3D-tulostus -

CNC kone -

Automaattinen kokoonpano -

Kaiverruskone
Hot Tags: 2-vaiheinen Ethercat Nema34 avoimen silmukan askelohjain OL3-E86H, Kiina, valmistajat, toimittajat, tehdas, räätälöity, valmistettu Kiinassa, halpa, CE, kestävä, laatu
Aiheeseen liittyvä luokka
Lähetä kysely
Ole hyvä ja lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.




